Transformation of dissimilarities in community data
Miquel De Cáceres
2024-08-26
Source:vignettes/Transformation.Rmd
Transformation.Rmd1. Introduction
Some dissimilarity coefficients that are popular in community ecology, such as the percentage difference (alias Bray-Curtis), have the drawback of being a non-Euclidean (dissimilarity matrices do not allow a representation in a Cartesian space), or even semi-metric (i.e. triangle inequality is not ensured). In order to use these coefficients in multivariate analyses that require these properties a transformation of the original space will normally be in order. In this section, we compare different alternatives and provide some recommendations on this issue.
## Loading required package: Rcpp2. Effect of square root on a simple directional trajectory
Here, we use an example of a single synthetic community to illustrate the effect of square root transformation on a community trajectory. We begin by defining the species data of the trajectory itself. The dataset consists of four rows (i.e. surveys) and four columns (species). The dynamics in this example consist in an constant increase in the number of individuals of the first species and a corresponding decrease of the others, while keeping a total abundance of 100 individuals:
sites = rep(1,4)
surveys=1:4
spdata = rbind(c(35,30,20,15),
c(50,25,15,10),
c(65,20,10,5),
c(80,15,5,0))We now use function vegdist from package
vegan to calculate the Bray-Curtis coefficient:
## [1] TRUE
D## 1 2 3
## 2 0.15
## 3 0.30 0.15
## 4 0.45 0.30 0.15This dissimilarity matrix is a metric, so one would not need any transformation for CTA. However, it is a good example to illustrate the effect of the square root transformation.
If we draw the resemblance space corresponding to this dissimilarity matrix we see a straight trajectory:
trajectoryPCoA(D,sites,surveys, survey.labels = T)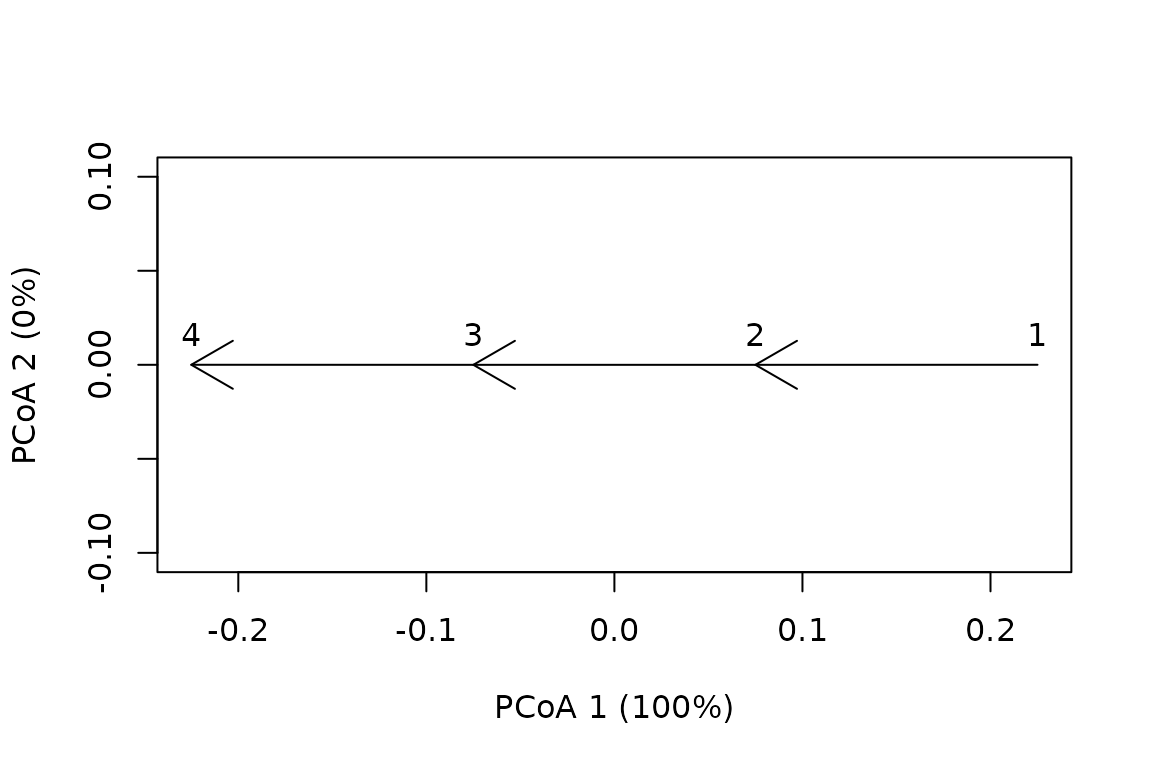 Here we see that Bray-Curtis dissimilarity responds linearly to the
proposed sequence of community dynamics. To confirm this geometry, we
can calculate the geometric properties of the trajectory (i.e. length,
angle between consecutive segments and overall directionality):
Here we see that Bray-Curtis dissimilarity responds linearly to the
proposed sequence of community dynamics. To confirm this geometry, we
can calculate the geometric properties of the trajectory (i.e. length,
angle between consecutive segments and overall directionality):
trajectoryLengths(D,sites,surveys)## S1 S2 S3 Trajectory
## 1 0.15 0.15 0.15 0.45
trajectoryAngles(D,sites,surveys)## S1-S2 S2-S3 mean sd rho
## 1 0 0 0 0 1
trajectoryDirectionality(D,sites,surveys)## 1
## 1Angles are 0 degrees and overall directionality is maximum (i.e. 1), in accordance with the plot and the data. We now proceed to take the square root of the dissimilarity values, as would be necessary to achieve a metric (and Euclidean) space in a more complex data set:
sqrtD = sqrt(D)
sqrtD## 1 2 3
## 2 0.3872983
## 3 0.5477226 0.3872983
## 4 0.6708204 0.5477226 0.3872983The transformation increases all dissimilarity values (because the original values are smaller than 1), but the increase is larger for smaller values, so the ratio between large dissimilarities and small dissimilarities decreases. This has an effect on the overall shape of the trajectory, which surprisingly now looks like:
trajectoryPCoA(sqrtD,sites,surveys, survey.labels = T)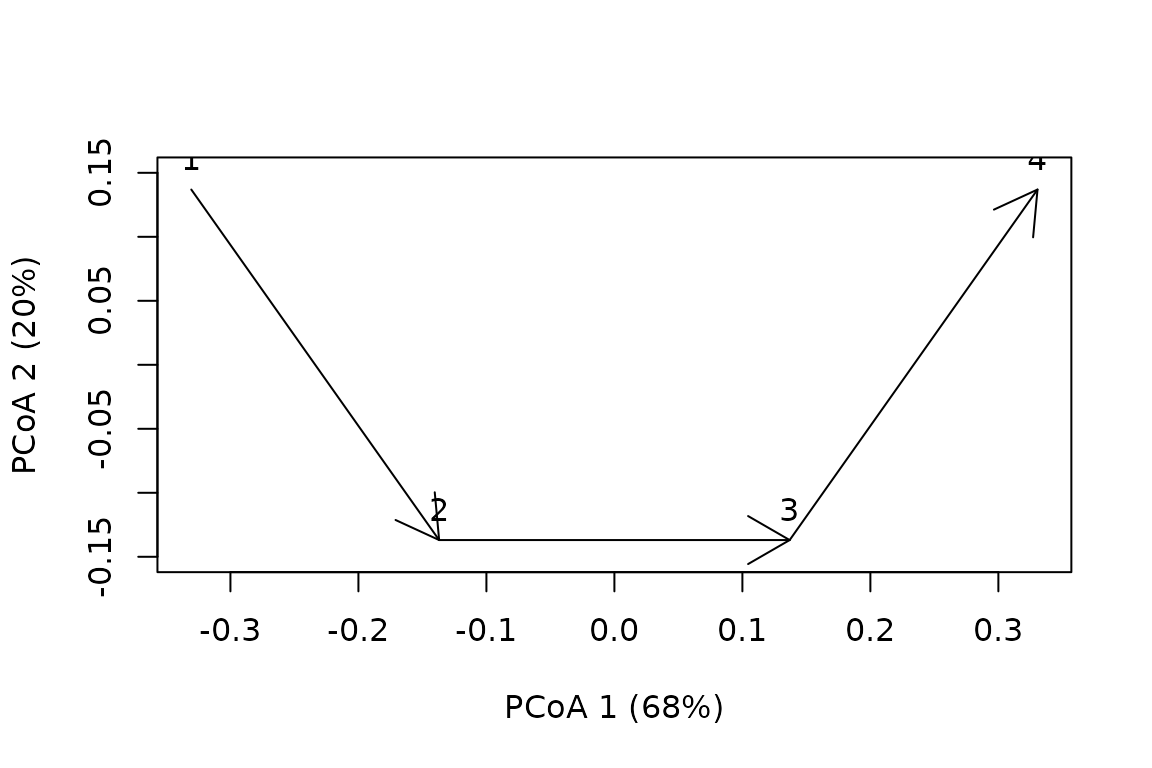
In addition to the distortion observed, the number of dimensions of the data have increased (i.e the sum of variance explained by the two axes is 88% < 100%), so we cannot be sure that the angles are well represented. If we re-calculate the properties of the trajectory taking into account all dimensions we obtain:
trajectoryLengths(sqrtD,sites,surveys)## S1 S2 S3 Trajectory
## 1 0.3872983 0.3872983 0.3872983 1.161895
trajectoryAngles(sqrtD,sites,surveys)## S1-S2 S2-S3 mean sd rho
## 1 90 90 90 0 1
trajectoryAngles(sqrtD,sites,surveys, all=TRUE)## A1 A2 A3 A4 mean sd rho
## 1 90 90 90 90 90 0 1
trajectoryDirectionality(sqrtD,sites,surveys)## 1
## 0.5The length of segments and the trajectory have increased, but all segments are of the same length, in agreement with the original trajectory. In contrast, the angles are now 90 degrees and the overall directionality has decreased substantially.
3. Effect of different transformations on more complex trajectories
Here we use simulated data to compare four transformation approaches:
- Local transformation of semi-metric dissimilarities (such as the
percentage difference) in every triplet when the triangle inequality is
required. This is done by default in the CTA functions of package
vegclust. - Global transformation of dissimilarities, using the square root.
- Global transformation of dissimilarities by using Principal Coordinates Analysis (classical multidimensional scaling) with eigenvalue correction.
- Global transformation of dissimilarities by using metric multidimensional scaling (metric MDS).
We use simulated dynamics to build another trajectory with more species (20) and more time steps. We begin by setting the number of time steps (50) and the size of the community (50 individuals):
Nsteps = 50
CC = 50
Nreplace <- CC*0.05Nreplace is the number of individuals to be replaced
each time step (5%). Now we define the initial community vector and the
vector with the probabilities of offspring for each species according to
some ecological conditions:
x <- c(0, 1, 0, 67, 1, 3, 0, 2, 2, 2, 1, 6, 2, 0, 0, 2, 5, 1, 6, 0)
poffspring <- c(0, 0, 0.002, 0.661 ,0 ,0, 0.037, 0.281, 0, 0, 0, 0.008, 0, 0, 0.005, 0.003, 0, 0, 0, 0)We can now simulate the dynamics by sequentially applying stochastic deaths and recruitment:
m <- matrix(0, nrow=Nsteps+1, ncol=length(x))
m[1, ] = x
for(k in 1:Nsteps) {
pdeath <-x/sum(x) #Equal probability of dying
deaths<-rmultinom(1,Nreplace, pdeath)
x <- pmax(x - deaths,0)
offspring = rmultinom(1,Nreplace, as.vector(poffspring))
x <- x + offspring
m[k+1, ]<-x
}Then we decide how frequently (with respect to the simulated step) a sample of the community is taken, here every four steps:
Sj <- seq(1,Nsteps+1, by=4) #Sample every four steps
mj <- m[Sj,]
surveys = 1:length(Sj)
sites = rep(1,length(Sj))Now we are ready to calculate the Bray-Curtis dissimilarity:
D <- vegan::vegdist(mj,"bray")In this more complex trajectory, some triangles may not obey the
triangle inequality (depending on the simulation). This can be inspected
using function is.metric:
is.metric(D, tol=0.0000001)## [1] TRUEDeviations from a metric space, if they exist, will be small, so that local transformation of triangles will be very small.
Local transformations are not possible to display trajectories. When
we plot the trajectory using function trajectoryPCoA the
global transformation of principal coordinates analysis (PCoA) with
negative eigenvalue correction is performed. This is fine to display
trajectories, but has problems when measuring angular properties, as we
will see.
pcoa<-trajectoryPCoA(D, sites, surveys, selection=1,length=0.1, axes=c(1,2), survey.labels = T)## Warning in cmdscale(D2, eig = TRUE, add = TRUE, k = nrow(as.matrix(D2)) - :
## only 11 of the first 12 eigenvalues are > 0## Warning in arrows(x[niini], y[niini], x[nifin], y[nifin], ...): zero-length
## arrow is of indeterminate angle and so skipped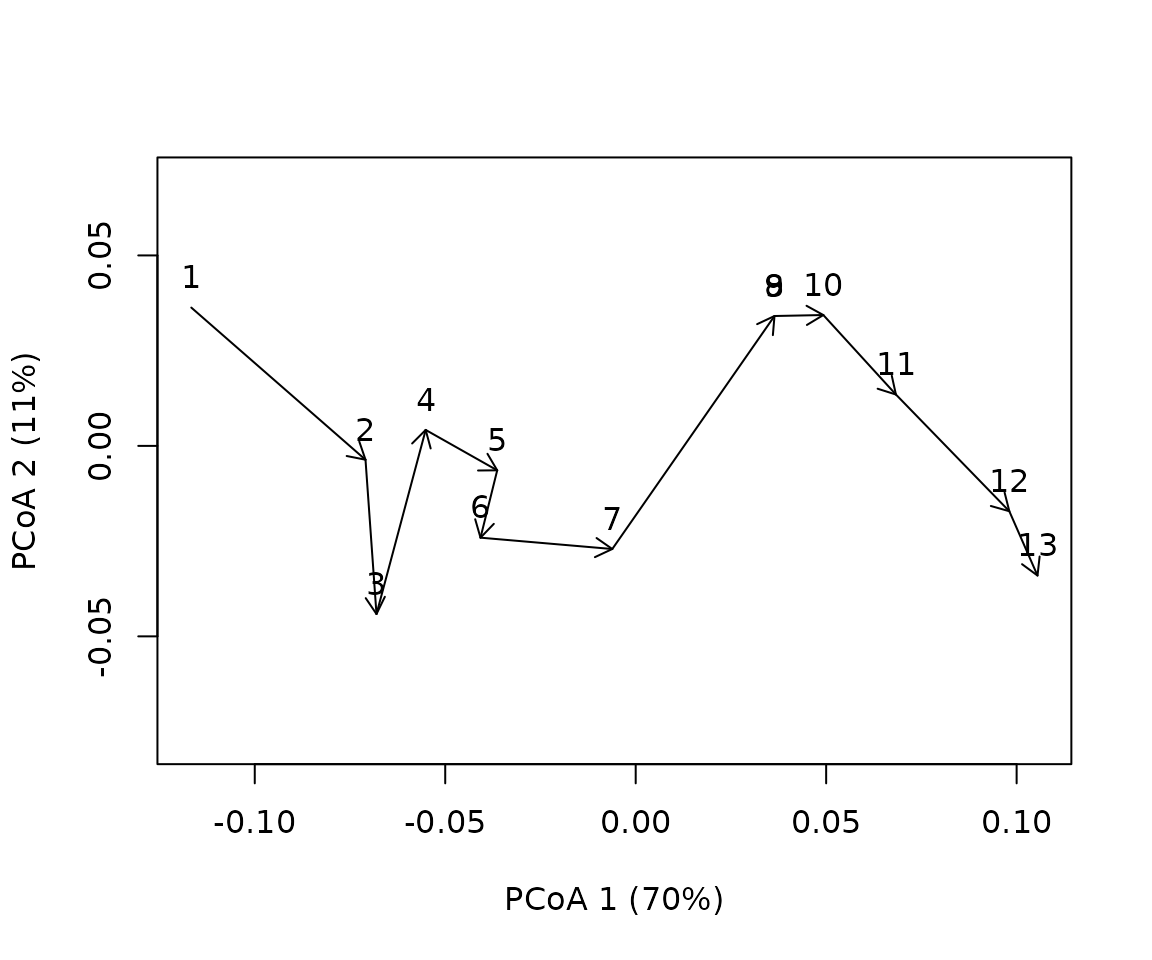
pcoaD = dist(pcoa$points)The trajectory has some twists derived from stochasticity in death and recruitment. Let’s now look at the square root of the Bray-Curtis dissimilarity:
sqrtD = sqrt(D)
pcoaSqrt = trajectoryPCoA(sqrtD, sites, surveys, selection=1,length=0.1, axes=c(1,2), survey.labels = T)## Warning in arrows(x[niini], y[niini], x[nifin], y[nifin], ...): zero-length
## arrow is of indeterminate angle and so skipped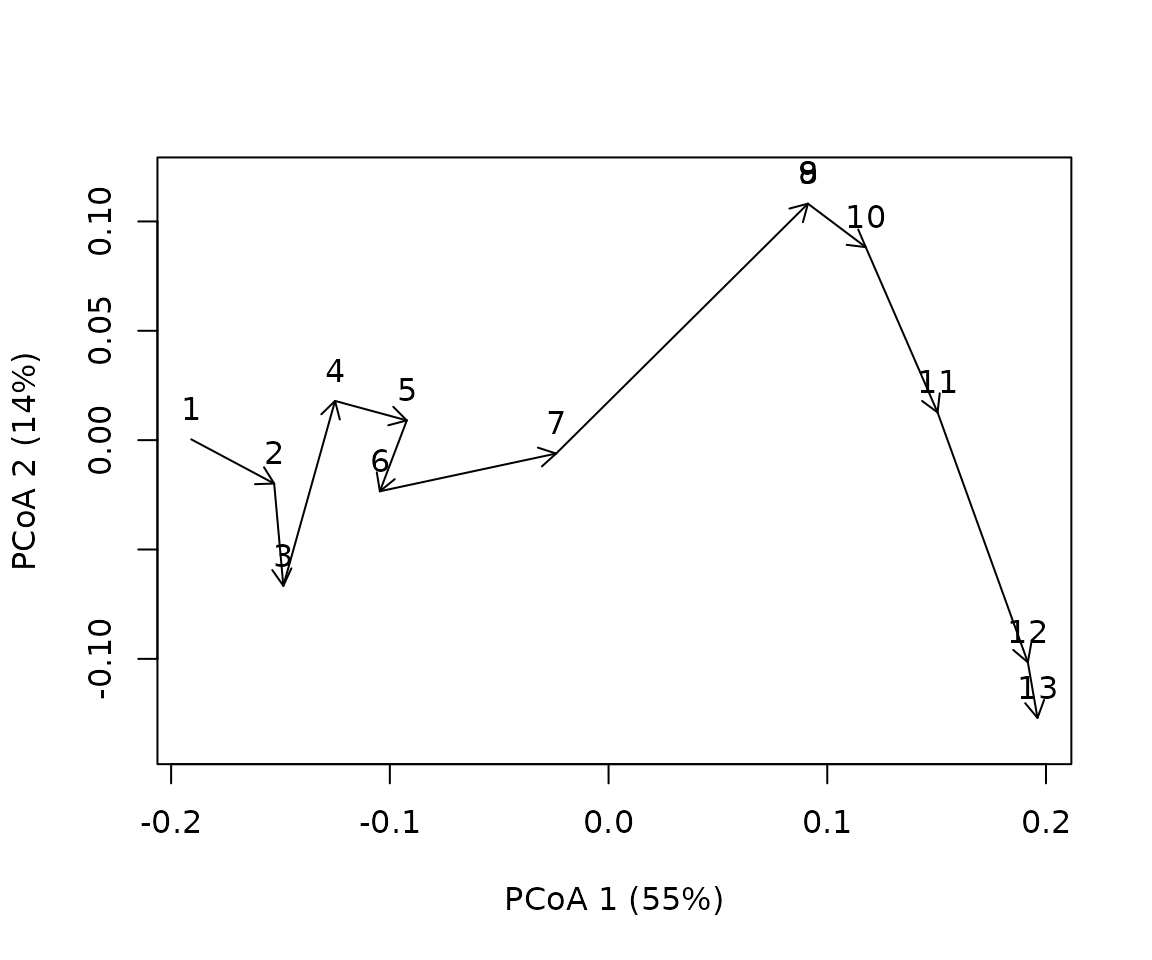
Finally, we also transform dissimilarities using metric
multidimensional scaling (mMDS), provided by package
smacof:
res <- smacof::mds(D, ndim = length(Sj)-1, type = "interval")
mmdsD <- dist(res$conf)
trajectoryPlot(res$conf, sites, surveys, selection=1,length=0.1, axes=c(1,2), survey.labels = T)## Warning in arrows(xp[niini], yp[niini], xp[nifin], yp[nifin], ...): zero-length
## arrow is of indeterminate angle and so skipped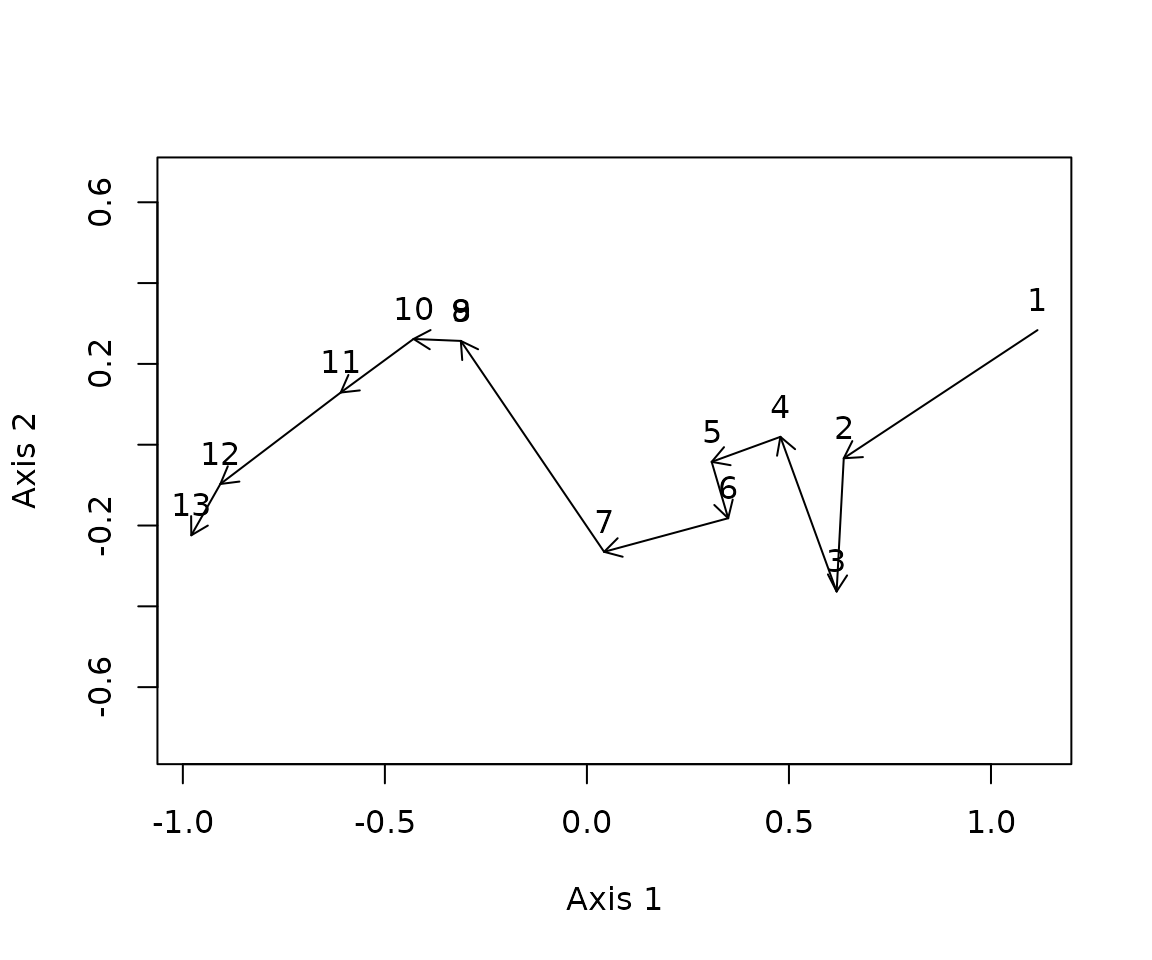
While the three plots look different, the differences are not striking (besides rotation issues). We can compare the stress of the global solutions:
smacof::stress0(D,pcoaSqrt$points, type="interval")##
## Call:
## smacof::stress0(delta = D, init = pcoaSqrt$points, type = "interval")
##
## Model: Symmetric SMACOF
## Number of objects: 13
## Stress-1 value: 0.077
## Number of iterations: 0
smacof::stress0(D,pcoa$points, type="interval")##
## Call:
## smacof::stress0(delta = D, init = pcoa$points, type = "interval")
##
## Model: Symmetric SMACOF
## Number of objects: 13
## Stress-1 value: 0.007
## Number of iterations: 0
smacof::stress0(D,res$conf, type="interval")##
## Call:
## smacof::stress0(delta = D, init = res$conf, type = "interval")
##
## Model: Symmetric SMACOF
## Number of objects: 13
## Stress-1 value: 0.013
## Number of iterations: 0Where we see that the square root leads to the strongest alteration of original dissimilarities. If we calculate geometric properties we are not limited by ordination plots and we can take into account all dimensions.
anglesD = trajectoryAngles(D,sites,surveys)
anglesSqrtD = trajectoryAngles(sqrtD,sites,surveys)
anglesPcoaD = trajectoryAngles(pcoaD,sites,surveys)
anglesmmdsD = trajectoryAngles(mmdsD,sites,surveys)
df<-as.data.frame(rbind(anglesD, anglesSqrtD, anglesPcoaD, anglesmmdsD))
row.names(df)<-c("local", "global.sqrt", "global.pcoa", "global.mmds")
round(df,2)## S1-S2 S2-S3 S3-S4 S4-S5 S5-S6 S6-S7 S7-S8 S8-S9 S9-S10 S10-S11
## local 0.00 75.52 82.82 0.00 97.18 104.48 0.00 0.00 NaN NaN
## global.sqrt 90.00 101.78 104.48 90.00 104.48 110.70 90.00 90.00 NaN NaN
## global.pcoa 80.72 98.29 103.57 77.78 104.99 112.42 91.92 91.92 105.24 102.26
## global.mmds 54.83 95.78 95.60 44.20 97.89 119.23 72.23 49.85 93.77 92.68
## S11-S12 mean sd rho
## local 0.00 38.10 0.83 0.71
## global.sqrt 90.00 96.81 0.14 0.99
## global.pcoa 80.72 95.46 0.19 0.98
## global.mmds 21.88 76.70 0.50 0.88The first call to trajectoryAngles with matrix
D represents the default strategy of transforming triangles
locally, which involves the weakest transformation of all and can be
taken as reference. Both the square root and PCoA with negative
eigenvalue correction induce a strong transformation of trajectory
angles. The global solution of metric MDS leads to angles that are more
similar to those of the local transformation strategy.
If we inspect the overall directionality, the global solution of metric MDS provides a value that is again closer to that of local transformation, compared to PCoA and the square root:
trajectoryDirectionality(D,sites,surveys)## 1
## 0.8770056
trajectoryDirectionality(sqrtD,sites,surveys)## 1
## 0.4810576
trajectoryDirectionality(pcoaD,sites,surveys)## 1
## 0.5927582
trajectoryDirectionality(mmdsD,sites,surveys)## 1
## 0.75322644. Conclusions
In this small study we compared the effect of different solutions to
violation of the triangle inequality. If function is.metric
returns TRUE for a given data set one should not worry about violations
of the triangle inequality. Local solutions are those that imply the
smallest number of changes, but these will not be consistent across
triplets, so users may desire to apply a global transformation that
produces euclidean spaces. This should be done with care. We have shown
how the square root transformation distorts the angles and overall
directionality of trajectories on the space defined by the percentage
difference (alias Bray-Curtis) dissimilarity index. We suspect that this
negative effect of square root transformation on angles happens no
matter which coefficient is used to derive the initial distance matrix.
Therefore, we advocate for avoiding its use when conducting community
trajectory analysis (in particular for angles). The global
transformation consisting in the application of PCoA with negative
eigenvalue correction is less strong than the square root, but it still
strongly change the angles between segments. Perhaps, the less harmful
global transformation is provided by metric Multidimensional Scaling,
but the need to embed distances in an Euclidean space of all three
transformations implies a stronger requirement than being a metric, and
results in distortions.